After Burning Man 2015, the best way to decompress for me was… Making something. And what better way of doing it than participating TOM hackathon (Tikkun Olam).
TOM is a program that started in Israel couple of years ago and spread like grass fire around the world. In one sentence – “72 hours or making assistive technology to help disabled people”. Many people with disabilities are facing different issue that effects their life – it could be something small that looks trivial for non-disabled person but for the disabled it is like opening a new world. One of the first TOM projects was a prosthetic arm for a guy who lost his during his military service. Before he lost his arm this guy used to play a guitar, because every injury is unique in a lot of cases it is not profitable for the companies that make these prosthetic arms to fabricate a costume made arm only for that person. This is where TOM steps in, changing an individual’s life.
Our project was the Carry Crutches challenge – A lot of people are using crutches permanently, due to diseases like Polio, injury or other reasons. Something that seems natural and simple like grabbing a coffee form the counter could oppose a huge challenge for a person with crutches – try it – I did, it is almost impossible without spilling the drink. This was the problem that our team aimed to solve during the San Francisco Bay Area 2015 TOM hackathon.
Our team had 5 people with different skill sets and disciplines. We all met each other for the first time in the first day of TOM. It always is an interesting experience to work so closely for 3 days with people you’ve met for the first time only couple of minutes ago.
We were:
Mechanical engineering – Tomas Garces – Brilliant, experienced mechanical engineer that did all the design, modeling and fabrication of the gimbal.
Matthew Wasala-Master of Architecture student who worked with Tomas on the design.
Need know-er –Daisy Bermudez, a woman that was using crutches for a long time and came up with the need / problem to solve.
Manufacturing – Ilan Sherman, an old friend of mine from IAI (Israel Aerospace Industries), an industrial designer and a maker woth 2 hand of gold.
Solution design, planning, electronics & embedded software – me, Maayan Dermer 🙂 I came up with the idea and led the development and integration from the technical side.
Administration, procurement and coordination –Benoy Bhagattjee ran the while show form administration, planning, appearing for the reporting of the TOM team lead meeting, helped us with procurement of different components that we needed and in generally kept us focused.

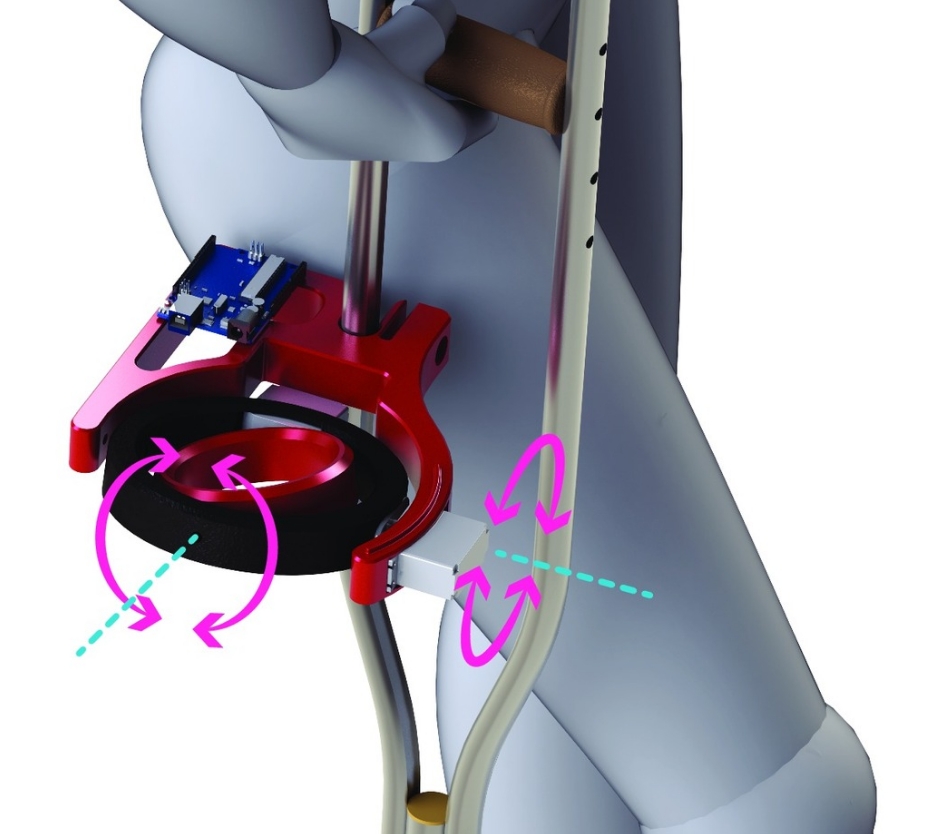
After a short introduction we approached the problem. The solution that came from my experience as an Avionics engineer – create a stabilized, motor controlled Gimbal with 2-3 rings that will hold the beverage cup stable – similar to a stabilized camera payload that widely used in drones. It servers the same function – keep an object steady and leveled while the rest of the platform is moving, but for another mission. Still the idea is almost identical:


We ended up with a 2.5 rings solution.
So we started the journey – 72 hours of making, we split the work between us and planned to integrate it as soon as possible, we worked simultaneously on:
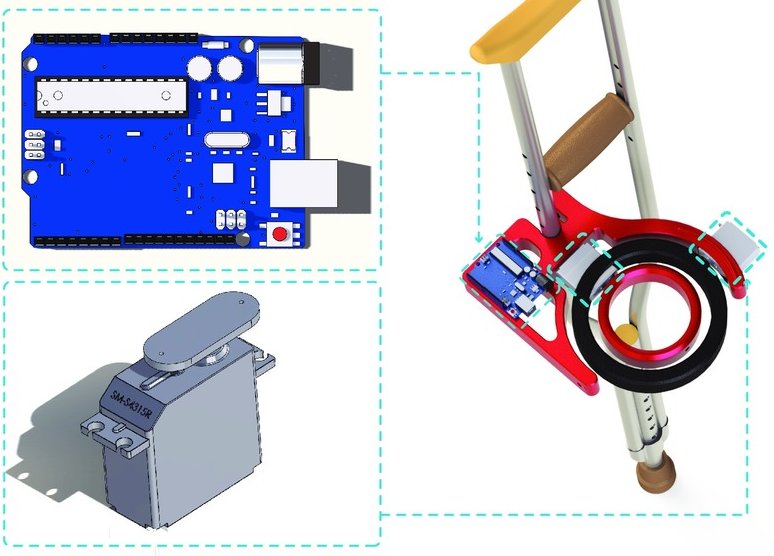
Mechanical design of the rings – Matthew and Thomas used Solidworks to model and create parts that we could 3D print on sight using the Makerbot printers that were provided by Autodesk for the hackathon. The guys did a great job and after the first run everything snapped together perfectly.
Manufacturing & fitting it to the crutches – Ilan helped with the design, worked on connecting all the parts together, install bearings in between the rings for a smooth operation. Afterwards me fitted in to the crutches.


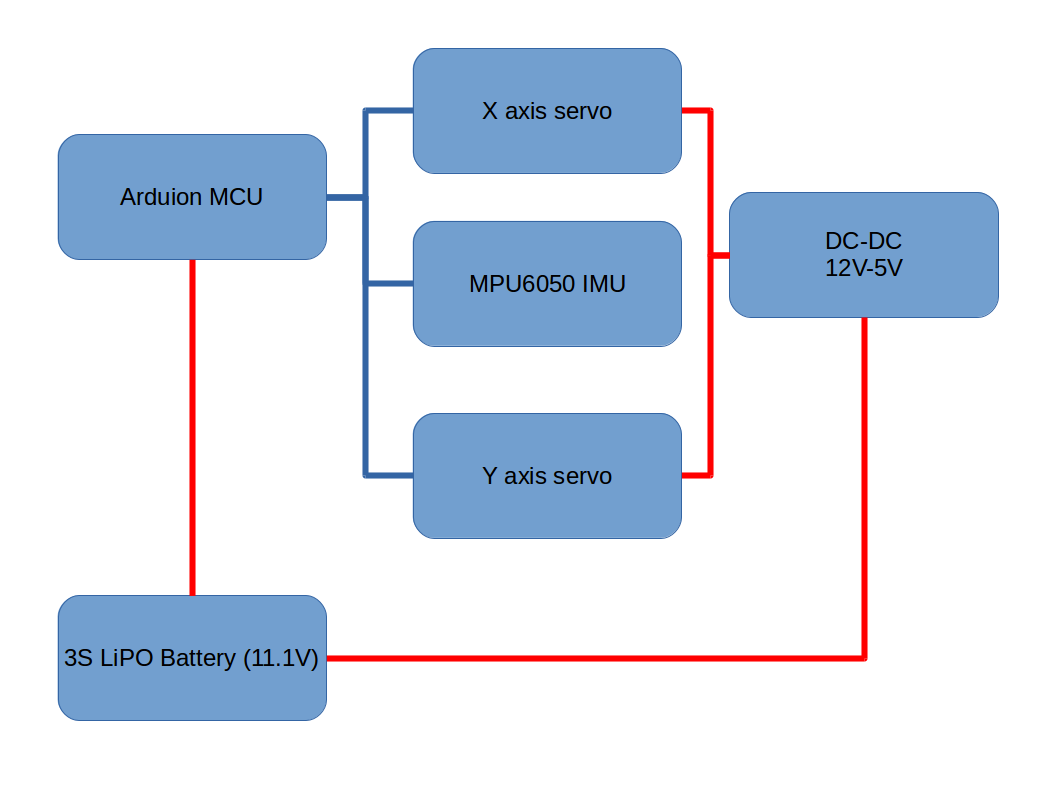
Electronics design and building – The plan was simple and straight forward, connect and MCU (Micro control unit)- ATMega328p (Arduino) to a widely used IMU (Inertial Measurement Unit) and have the MCU command 2 motors to move the gimbal in a reversed angle and speed to the movement in space that the IMU is experiencing so the beverage won’t spill out. I also meant that the IMU was needed to be place on the gimbal itself in a location close as possible to the center of the mass of the object it need to hold – in this case a cup with liquid. I created a bit of a challenge while writing the code & debugging it, the wires almost got broken couple of times :\
Software design and implementation – Like the hardware picking, the software was straight forward as well, simple quaternion math with Euler representation for debugging, couple of 1st order filters, medians, moving average and we have a closed loops system. I re-used code from other projects that I worked on.
Movement integration – motor integration: We choose servos as our movement motors, we just happen to have some in the right size as part of the equipment we had for the hackathon, so in a way we adapted our design for the servo motors that we had. We created extended servo arms to get more leverage and power.

Testing by our need knower – after the integration our crutches experienced need know tested it and gave us her inputs. I adapted the software according to her inputs – it was mostly the speed and sensitivity of the gimbal due to rapids change in angles and shock as a result of walking – something we didn’t anticipated till the first run, this is why integration is so important. Because of our planning we had time to test and fine tune it.
System Architecture:
Here is the first run of the system, me and the guys at 2AM working like crazies and having lots of fun:
Unfortunately, I didn’t save the code to my github (It was a crazy hackathon) but today you can find many examples of gimbals on the web – most of them are being used by drone hobbyist and they are open sourced – I didn’t invent the wheel, like any good solution, I re-used some of my previous code and experience from the Aerospace world sildentadal.com/.
From mechanical point of view, the solution was so good that we even managed to build a purely mechanical version without and electronics of motors. It was less responsive and slower but it also worked. You can download the mechanical design form Thingiverse: http://www.thingiverse.com/thing:1018055/
Overall, we had good time – couple of days making, meeting new friends and most important – helping people. We even appear in Google’s front page of assistive technology challenge as they were part of the companies who sponsored the hackathon: https://www.google.org/impactchallenge/disabilities/makeathon.html